当前位置:给览网 » 公司 » 深圳市鹏锦科技有限公司
在线沟通:
- 无人机产品系列
- M30T
- M300RTK
- UTC无人机证
- DJI Mavic 3E
- M3M
- ebee plus
- 无人机Elios
- 大疆机场
- 御2进阶版
- 悟二
- DJI Mini 3
- DJI Mavic 3
- DJI Avata
- M3T
- M350RTK
- FlyCart 30
- YXCL200
- CAAC无人机驾驶室
- 管道检测设备
- CCTV管道机器人
- 管道潜望镜
- 管道修复
- DT-GXY-300C
- 视觉位移监测
- HL7000
- GXY-200
- X5-HR
- 激光三维扫描仪
- 手持式三维扫描仪
- 拓普康三维扫描仪
- 拓普康IP-S2 HD激光扫描车
- 法如三维扫描仪
- 激光三维扫描车
- GoSLAMRS100S
- GoSLAMRS100
- VS100-MT
- DS100
- 气象仪器
- 美国DAVIS气象站
- 天圻
- 移动气象站
- 大气环境气象监测站
- 地下管线探测仪
- 英国雷迪RD8100/RD1100
- 美国里奇SR-20/SR-60
- 德国管道听漏仪
- PCM+/PCMx防腐层检测仪
- RD316井盖探测仪
- 非金属材质管线探测仪
- 英国雷迪RD8200
- 1205CXB™ 电缆分析仪
- 求积仪
- 日本小泉 KP-21C
- 日本小泉 KP-90N
- 小泉测距笔
- 探地雷达/地质雷达
- 英国雷迪RD1100/RD1500
- 加拿大LMX100
- SS1LMX200
- DZLD4000地质雷达/管线雷达
- GS8000
- 美国KESON 测距轮
- MP401E
- PJK牌 测距轮
- 美国KESON卷尺KESON测绳
- RR3M
- RR10M
- MP315m
- 激光测距仪
- 迪卡特望远镜测距仪
- PJK牌 测距仪
- 激光测距传感器
- Newcon激光测距仪
- 拓普康仪器
- LN-100放样机器人
- 拓普康mmGPS 3D摊铺控制系统
- GTL-1200 全站式扫描仪
- GLS-2200 三维激光扫描仪
- LN-150 BIM放样机器人
- 手持GPS
- 麦哲伦 GPS
- PJK牌 GPS
- 阿什泰克 GPS
- 彩途 GPS
- 天宝 GPS
- 光谱 GPS
- 佳明 GPS
- PJK牌面积测量仪
- 集思宝 GPS
- GNSS RTK系统
- 天宝 RTK
- 阿什泰克 RTK
- 中海达 RTK
- 集思宝 RTK
- 北天CNSS内置天线
- 全站仪
- 瑞得 全站仪
- 科力达 全站仪
- 天宝 全站仪
- 尼康 全站仪
- 徕卡 全站仪
- 中海达 全站仪
- 宾得 全站仪
- ASAHI SEHO
- 颗粒测试仪 AS2100
- 炭黑吸油值测试仪s500
- FVM70A
- GIS 数据采集器
- 阿什泰克 GIS
- 光谱 GIS
- 南方 GIS
- 中海达 GIS
- PJK牌 GIS
- SDI土壤硬度测定器
- 水准仪
- 天宝数字水准仪
- 徕卡数字水准仪
- 科力达水准仪
- 宾得水准仪
- 激光扫平仪
- 莱赛扫平仪
- 电子经纬仪
- PJK牌 经纬仪
- 宾得 经纬仪
- 激光标线仪
- 水文产品
- 测深仪
- 手持式测距仪
- 容量探测
- 布拉本德炭黑吸油计
- 超硬刀片逐个加工的装置
- macoho
- 多光谱相机
- Rededge-MX
- Altum-PT
- Rededge-P
- MS600 PRO
- RedEdge-MX blue
- 光谱仪C-7000
- 无人机负载
- 禅思l1
- 禅思P1
- 禅思H20N
- 禅思H20T
- 赛尔102S
- 赛尔102SV3
- 赛尔202S
- 赛尔303S
- SHAER100MPRO
- 成至MP10E
- 成至MP140无人机喊话器
- MP130S 无人机数字语音广播系统
- SHARE 203S PRO
- 赛尔 304S PRO
- L2
- 解决方案
- 大坝裂缝检测
- 高光谱
- Gaiasky-mini-
- 超声波成像仪检测
- Pundit 200
- 数据后处理软件
- Yusense Map Plus
- PIX4D
- APS
- 大疆智图
- 司空2
- PIX4Dcatch
- PIX4DVIDOC
- 工规级激光雷达
- Mid-70 大疆激光雷达
- 泰览 Tele-15 激光雷达
- 电器保护测试仪
- T46D
- 检测和监测系统
- 智能型深层水平位移测量仪
- 智能型低功耗采集仪LORA版/ NB-IOT版
- 土壤速测仪
- 土壤温湿度记录仪
- 土壤水分测量仪
- 表面位移监测仪
- 振弦式钢筋测力计
- 振弦式土压力计
- 天宝
- Trimble GEO 7X 手持RTK接收机
- Trimble X7
- 无人机降落伞-火萤科技Flyfire
- 三维复合式影像测量仪
- 芯片系列
- 模块
公司名称: 深圳市鹏锦科技有限公司
联系人:李小姐
电话:0755-83322219
手机:电话/微信18320930029
传真:0755-25121578

邮件:2850187695@qq.com
地址:深圳市龙岗区布吉吉华路228号欧密大厦A栋6楼602
大疆智图新能
发布时间:2023-01-29浏览次数:1335返回列表
新增相机信息菜单
新增相机信息菜单,可设置相机内参,提升三方相机建模度。
1、在导入照片数据后,大疆智图会读取照片文件夹中张照片的相机信息。点击相机信息右侧的查看按钮,可在相机参数设置页面查看/编辑相机信息。

2、使用大疆以外的相机/负载采集的数据,用户可以在相机信息页面中,根据从相机厂家获取的数据,设置对应的相机名称、35mm 等效焦距等信息。

3、在使用多镜头相机时,需将不同相机拍摄的照片放在不同的文件中,再点击文件夹按钮,根据每个文件夹单设置相机信息。

4、可在设置中调整相机内参,解决因相机内参不准确导致建图度较差的问题。使用大疆以外的相机,可根据从相机厂家获取的相机内参数据行填写。
注意,不同厂家采用的畸变模型不同,参数需要根据不同模型行调整。
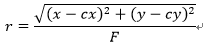
大疆智图采用的畸变模型为:

其中:
△x,△y为像点改正值;
x,y为像方坐标系下的像点坐标,坐标系如下图所示;
cx,cy为像主点,F为镜头的焦距。
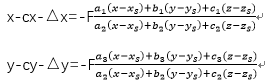
由此,引入畸变差后的共线方程为:
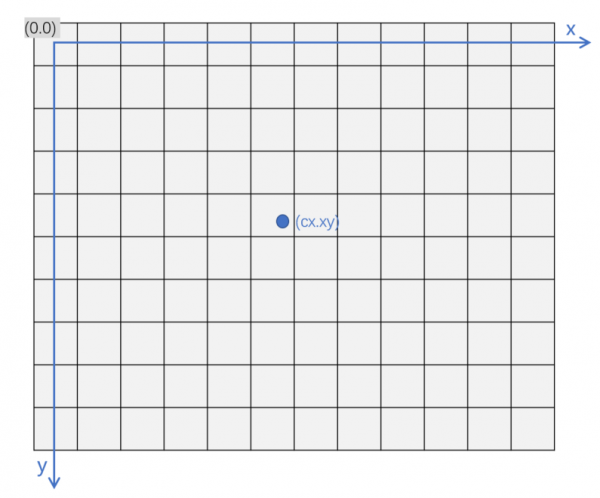
像方坐标系
在固定相机参数菜单中,如果选择固定相机内参,则该相机行计算时,智图不会再重新计算 F、CX、CY 数据。该项适用于纯正射数据(没有程优化)。如选择固定,则智图不会再重新计算相机信息,适用于已有优解内参,如已通过标定或已有务计算得出过优解内参的情况。
新增七参数转换能
需要注意的是,大疆智图仅支持由自身软件计算出的七参数行转换,不支持输入三方的七参数。在计算七参数菜单中,计算七参数需要导入.txt和.csv格式的数据。数据信息和格式要求如下:
坐标点名:纬度(B、度格式)、经度(L、度格式)、程(H)、东(x)、北(y)、(z)
注意:txt文件使用逗号(,)制表符作为列分隔符,请确保至少3组坐标用于七参数计算。

2、在导入数据后应行检查,B/L/H和x/y/z的数据是否正确对应纬/经/以及东/北/的顺序。注意:x东坐标般为6或8位,y北坐标般为7位。同时表头等无关信息,可通过操作菜单列中-行删除。

3、点击计算能后,可看到七参数计算结果以及转换误差。推荐转换误差小于预期成果度的0.5倍(如要求成果度为5cm,则建议转换误差小于0.025),可以得到较转换结果。如果误差较大,可删除转换误差较大的选项重新计算。确认转换误差达到要求后,点击应用成七参数计算并应用该七参数。
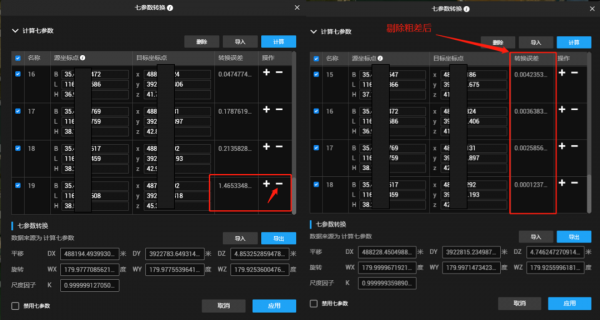
4、若后续在同区域行数据处理,可直接点击导出能,将七参数以JSON格式行保存。后续直接通过导入行调取复用即可,无需重新计算。
注意:用于七参数计算的坐标数据,分布原则类似地面控制点的原则。应均匀分布在测区周围,不要求定在测区内,但是不可集中在测区局小范围内。否则得到的七参数即使得到很的转换误差,但是在远离计算数据的区域,实际上会产生较大偏移。
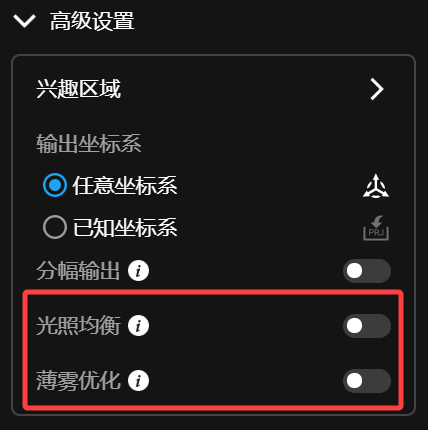
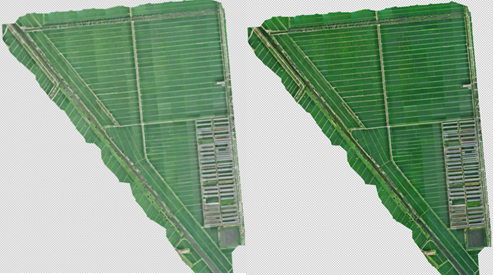
新增光照均衡
开启光照均衡会对重建模型同时行光照均衡和去雾处理,可改善在农田场景中,由于土地或作物冠层平滑,在强光照环境下会产生类似镜面反射的效果,导致照片边亮边暗,重建成果出现“渐变“条纹的现象。
新增薄雾优化
开启薄雾优化仅去雾,不会行光照均衡。
二维地图坐标测量能新
点测量增加度信息
二维正射模型的点坐标测量增加程测量,显示的程为 DSM 的程值。
线测量新增坡度信息
线测量时,除了原有的水平距离、直线距离、垂直距离外,新增坡度信息。

二维地图压缩瓦片大小
大疆智图优化了二维地图瓦片大小,在不影响模型效果的情况下,文件大小比例压缩至原本的三分之。特别是在 web 端的加载速度得到有效提升,有助于优化数据的交互处理和应用效果。
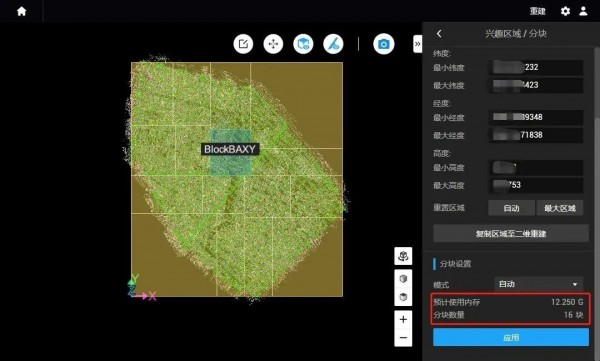
三维重建自定义设置新增分块模式
在三维重建中, 为保证效率,大疆智图会根据电脑内存设置大分块。但有些场景(如导入三方修模软件)需要小的分块,此时可以自定义设置分块大小,大疆智图新增以下分块模式:
自动:获取设备当前的可用内存,自动大化分块,并可显示内存分块信息。
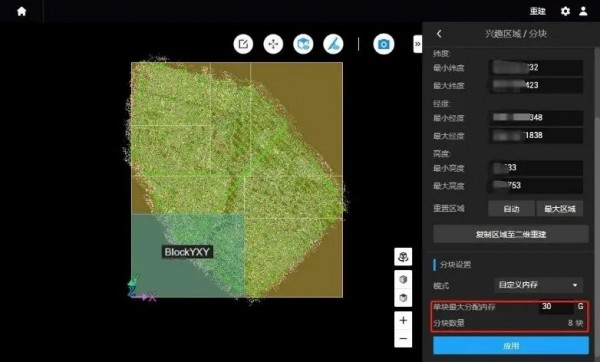
自定义内存:输入单块大分配内存,软件将依据输入的内存值行分块。
自定义边长:根据用户输入的单块边长行平面分块,软件界面会显示当前距离下的分块所需内存以及分块数量。
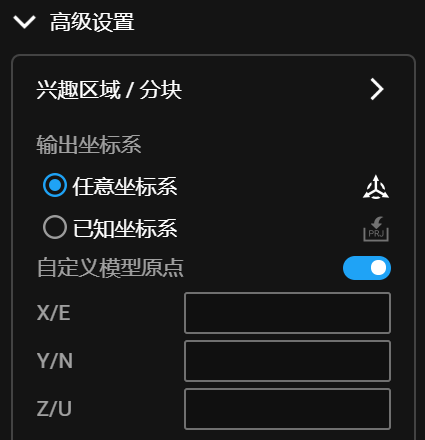
自定义分块起始点:开启后可自定义分块原点的坐标系及坐标值,在模型新的场景中,可以设置统的分块起始点,替换对应块即可成模型新,该能需要配合自定义模型原点能同使用,才能达到良好的分块模型新能体验。
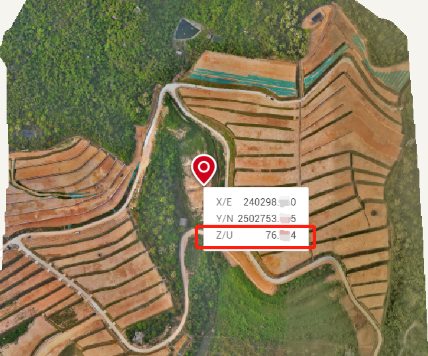
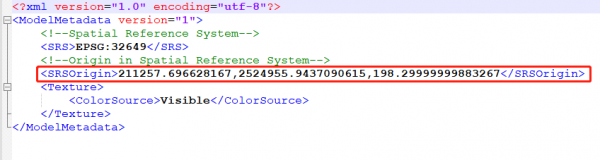
自定义模型原点
当需要将多个务成果,同时在模型平台上行展示时,可将多个务的模型原点设置为同坐标,即可同步展示。以osgb格式为例,为了减少文件存储大小,每个osgb文件中写的都是基于模型原点的相对坐标。
模型原点坐标系与输出坐标系应保持致,设置成后开始重建。则OSGB、OBJ、PLY成果的模型原点将被设置成输入点的坐标,原点位置会写入me
模型原点坐标系与输出坐标系应保持致,设置成后开始重建。则OSGB、OBJ、PLY成果的模型原点将被设置成输入点的坐标,原点位置会写入me
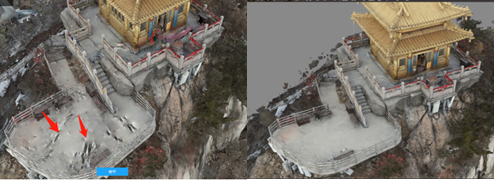
优化三维重建水面平整能
在行三维重建时,测区内的水面区域往往会导致网型异常,为后期修模增加作量。大疆智图新增三维重建水面平整能。
能选项开启后,能自动识别区域内的水面,行平整,在倒影、漏识别、误识别上有明显改善,减少水面平整破洞情况,大幅提升模型美观性,降低后期修模成本。
未启用三维重建水面平整
启用三维重建水面平整
点云成果新增合并能
在行 DJI L1 点云数据处理,或可见光三维重建生成“点云成果”时,可能因为原始数据存储在多个文件夹或内存太小,导致成果拆分成多个点云文件。
成果合并
大疆智图新增“点云成果合并”能,能开启后将多个点云文件合并生成个整的点云文件,此能支持的点云格式包括 LAS、PLY、PCD 三种。
程度检查
激光雷达点云数据处理能新
新增程度检查
大疆智图支持激光雷达点云务导入检查点,行程度检查,在质量报告中自动生成程差报告。该能的原理是在检查点周边定范围内,将点云行内插,附和到检查点的平面位置,并对比程差。因此检查点应署在平坦表面,避开墙角等位置。
检查点统计报告
在激光雷达点云设置中的度检查菜单中,成检查点的导入,建模后即可在质量报告中获取检查结果。
导入检查点的示意图
新增点云平滑能
无人机激光雷达行数据采集时,时常出现点云过厚的问题。特别是对硬质平面如平地、路面、山坡行测量时,如激光雷达采集的点云厚度过厚,地面点提取效果较差,导致测绘度不理想。
点云平滑
大疆智图新增点云平滑能。开启点云平滑后,即可有效压薄点云,优化地面点的提取效果,提升地物特征的呈现和成果度。
本效果图中被测物为柏油马路硬质地面
平滑前点云厚度约为 14.4cm 左右,平滑后降至 5cm
点云密度支持以物理距离采样
大疆智图支持在点云密度项中设置以物理距离采样,可在固定的距离范围内,有效降低点云的数量,使点云密度加均匀。
点云密度按物理距离采样能入口
可设置 5-50cm 的点云采样距离。需注意的是,如果距离过大则可能产生点云稀疏的问题,建议根据项目实际需求设置采样距离。
其他项目新
1、优化重建务复制能,支持复制重建参数及空三成果。
2、优化像控点文件导入能,支持定义像控点文件格式。
3、激光雷达点云处理默认的输出坐标系修改为 UTM 投影坐标系,根据基站中心点判断投影带。
4、优化 OSGB、OBJ 和 PLY 模型成果文件结构和文件名,适配多后端软件(如修模软件)。
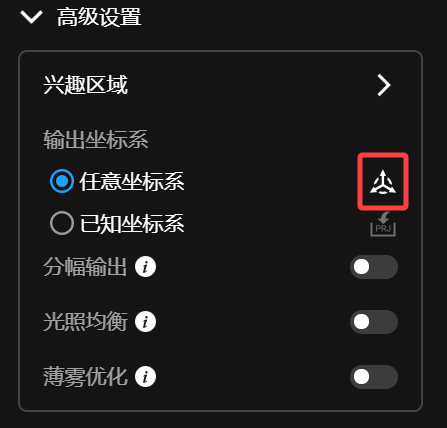
5、兴趣区域界面的三维模型显示由透视投影变为正交投影(平行投影)。
6、二维可见光重建(农田场景、果树场景)及二维多光谱重建适配安培显卡框架(RTX30 系列)。
7、三维模型分块重建增加单块重建失败后重试两次的机制(若重试两次失败则跳过),可提重建成率。
8、重建错误提示优化,键导出日志。
9、细化巡检航线新增适配机型。
10、支持单机重建设置「被摄物体距离」参数。
11、优化光照差异大的数据源在二维重建时成果的色彩致性。
12、优化 Windows 11( 64 位)操作系统的使用体验。
13、优化实时重建的稳定性、重建度及色彩致性。
14、优化分输出坐标系下激光雷达点云务的重建速度。
*转载请注明来源慧飞